‘Turing test’ for animal systems

Project leader Liang Li is focusing on bioinspired robots, but also looking at how robots inspire biology. Heiko Hamann came to the University of Konstanz as a professor for cyber-physical systems in 2022. And Andreagiovanni Reina is a new CASCB group leader who started in December 2023. His aim is to enhance the field with his theoretical and practical knowledge in collective decision-making and swarm robotics.
What are the advantages of studying collective behaviour with robots, and why do you think it is important?
Abdreagiovanni Reina: There are two main research directions where I can see robotics helping us to study collective behaviour. One direction is using robotics to understand biological systems, a lot in line with what Liang already did in the past years and that we plan to continue. The other is to design the behaviour of the robot groups using inspiration from biology. Finding the algorithm that the individual robot should follow to achieve efficient group coordination has proven very difficult. Looking at nature is a really good way to find efficient solutions because group-living animals have very effective and efficient ways to work together, and we want to exploit the solutions that evolution already found to design the robots of the future. That is why it is great to have roboticists and biologists doing research together as a team.
But why do you need to use robots for studying even fundamental questions, where you have to deploy these physical robots, which can be very complicated? Why do you not just use simulations?
Liang Li: There are basically two reasons: one is the true noise in the robotic system, which is actually embodied in it. The robots interacting with the environment will naturally generate random noises. When you simulate this, the random noise in codes is often not really random. But when the robots interact with the real environment, you cannot really avoid those true random noises. The second point: you cannot break physical laws. Given specific assumptions, simulations, or mathematical modelling, could somehow result in the breaking of physical laws. Such as simulated birds cannot fly, or fish gain swimming efficiency over 100 percent.
Andreagiovanni Reina: I see it as an extension of the fantastic technology for virtual reality that is already in place in Konstanz. The virtual reality can be extended to include robots in the loop, becoming somehow a ‘robotic reality’ with robots interacting with animals. Furthermore, even when robots are alone, without animals, I believe it can be very important to run experiments with real robots rather than simulation, especially when the environment is too complex and impractical to simulate. For example, when the robot interacts frequently with its environment, or hydro-/aerodynamics is involved.
Heiko Hamann: I would just like to mention two quotes. One famous quote from Rodney Brooks, a roboticist from the early days. He said: “The world is its own best model.” And the other quote is from Richard Feynman: “What I cannot build, I do not understand.”
Liang Li: This means that if you really want to understand the biological system behind something, the best way is to create one.
https://youtu.be/RAXSqn250Fc?si=eiubUY4CFA4dA3cA
I wonder if you could give more examples how robotics can help us to understand collective behaviour better? And our society as a whole?
Liang Li: Another advantage of using robots in collective behaviour is that you can interact with animals in the physical world. In this way, you can also check the collective mechanism based on a method, which we called the ‘Turing test’ for animal systems. Different modelling systems, different simulation systems, or different rules can explain the same phenomenon in collective behaviour. But which one could be the one closest to the rule adopted by the real biological system? Or which one is the best? Our approach for solving this is basically by creating a robot that could interact with this animal system and checking whether this robot’s behaviour is natural or not, based on the behaviour of the real system.
RoboTwin of the biological system
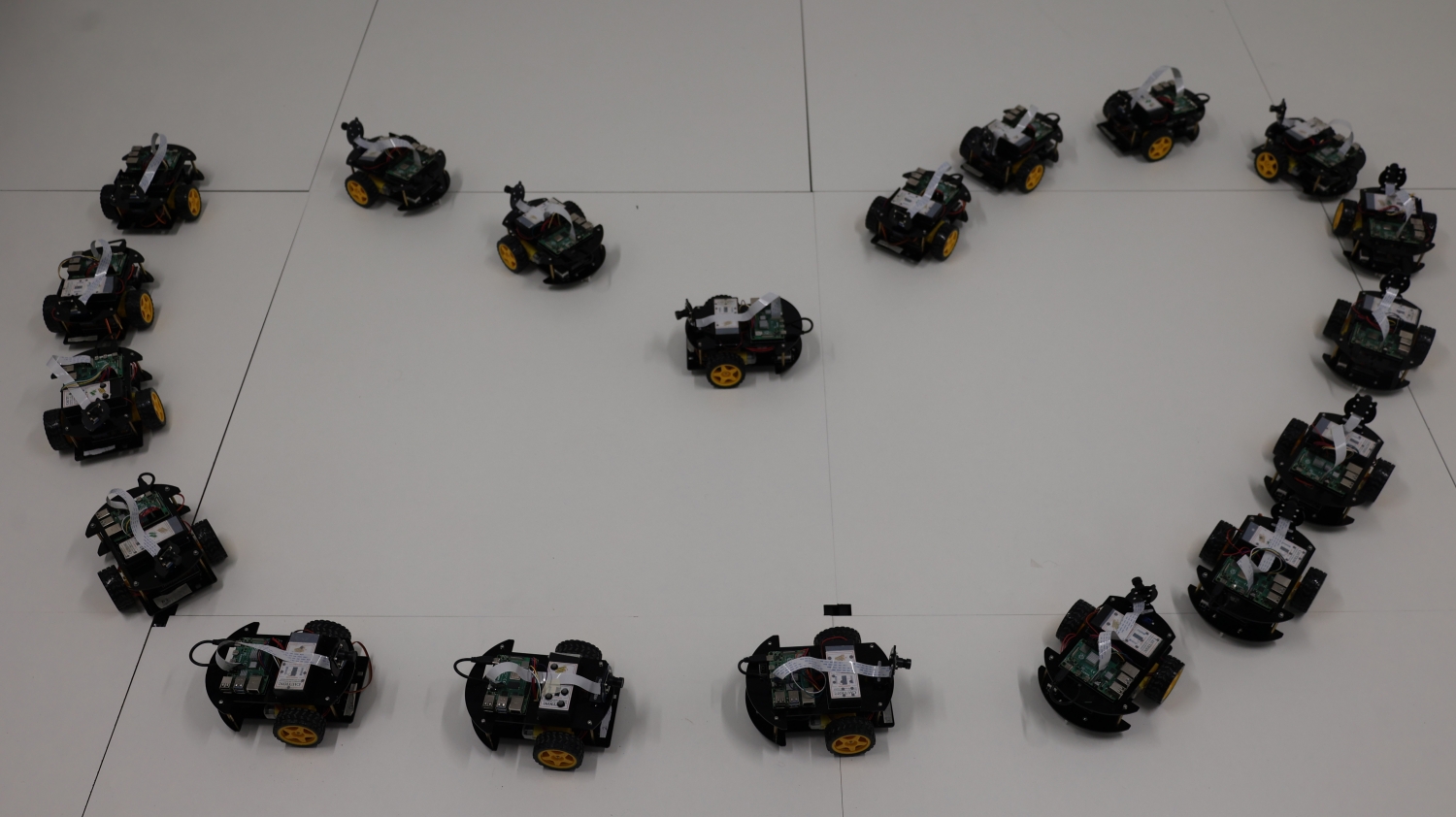
Sometimes, you have to give your robots some space. That is why you conduct experiments in the special swarm lab, the Imaging Hangar.
Liang Li: Yes, we used the Imaging Hangar to link robots to biological systems. So far, we have used a virtual reality system to find a very simple following behaviour rule. Basically, the rule describes how a follower follows the leader. We wonder why this rule applies. Why not another rule? It is very hard to test this within biological systems. That is why we have shifted to robotic systems to test it. We applied the rule and compared its performance against a human-designed optimal control law in three different robots, including drones, robot cars, and robot boats. We are now analyzing the data.
What do you plan next?
Liang Li: My research philosophy or my dream would be to have a RoboTwin of the biological system. RoboTwin means we want to copy nature, copy morphology, copy moments, copy behaviour. And once we have these for the robot system, we can use these robots to study biological questions. There is thus a kind of a co-evolution between robots and biological systems. If you understand biology better, then you can build better robots. And better robots would help us to better understand biological systems. This robot twin could exist, for example, for swimming fish. They are swimming, they are interacting through hydrodynamics, and/or through vision. We can also have a robot that can do this too. And then, based on that, we can use this robot to ‘talk’ to the real fish system. Here, when I say ‘talk’, I basically mean interacting real fish with biologically meaningful hydrodynamic or visual interaction. And then we can understand biological systems better and build a better robot fish. And on the behaviour level, RoboTwin could extend to swarm robots. We are also trying to produce swarm flying robots that can fly as twins of biological systems. The territory robots could move as twins of insects. That is my hope.
Heiko Hamann: I like this robotic twin. So it’s like in industry, where they have the digital twin?
Liang Li: Exactly, that is my inspiration.
© E. Böker, CASCB
Where robots meet beauty
How is your research inspired by biological systems and why?
Andreagiovanni Reina: Nature often finds the most efficient solution to the problems it faces. And our future autonomous robots may face problems very similar to what some species are also facing, such as finding and sharing resources, transporting objects, looking after the nest, dividing work among team members. My research looks at how individuals can efficiently exchange information to make fast and accurate collective decisions. I say ‘efficiently’ in the sense that robots might not need to exchange a lot of information. Maybe simple signals are enough, and we could have really simple machines. That follows the line of research of minimal robotics, where very simple machines cooperate, interact, and self-organize to perform tasks and solve problems as a group with capabilities superior to the ones of any individual alone. Here, nature is, of course, a fantastic source of inspiration because you can find very efficient and smart solutions that use very minimal resources and work very well!
Surely, it is not necessary to transfer every single detail fom nature to robots, is it?
Andreagiovanni Reina: Correct, one thing to keep in mind is that we do not always want to copy every detail of natural systems. For example, animals’ priorities are eating and reproducing, but these are not priorities for our robot. This is to say that when we reproduce animal behaviour, often our method is to just focus on the part of the animal behaviour that is convenient for us and omit what is not needed for the robots. Luckily, animals do many things that are relevant for autonomous robots, for example, how animal groups locate and transport food is a very precious source of inspiration for warehouse robotics. This distinguishes my work from Liang’s project, where he aims to build a RoboTwin and mimic as closely as possible the same mechanisms and the same behaviour of the animals.
Heiko Hamann: Andreagiovanni mentioned that there is this idea of minimal swarm robotics as a way to really try to constrain yourself. You do not put all the available technology into the robot, so you keep the complexity of the robot low. You still want to achieve something by letting them work together. And this is, of course, the line of research that is following more the biological inspiration. But then you can also put some additional sensors, for example some means of communication, on top of these robots to enable them to do more. And then you move out of this biological domain because suddenly your robots can perhaps almost communicate with everybody in this form.
© E. Böker, CASCB
Where do robots meet beauty?
Heiko Hamann: In modelling. Sometimes we start from modelling a swarm robotics system and then, in the process or maybe by design, we think, this actually also applies to some extent to the biological system. Real beauty is when you see that the artificial swarm and the natural swarm fit together, which might indicate that you have found something.
What do you aim to study together?
Andreagiovanni Reina: Liang, Heiko, and I have already started discussing the idea of testing the theory of the geometry of decision-making which Iain Couzin and his group are working on. The main idea is that decisions are not made in a vacuum, sometimes you make this abstract assumption for mathematical convenience, but animals make their decisions embedded in the environment. And so the geometrical properties of the alternatives around you are crucial in the dynamics of your decision. If you are far away or close by, the resulting actions are totally different, and while you make the decision and move, things change around you. There is evidence that a variety of very different species follow a similar pattern, suggesting that it might be a general property of every organism on the move. The three of us are interested in combining our efforts to reproduce these rules and patterns in robot teams and to see if this can be an efficient solution for autonomous robotics.