„Turing-Test“ für Tiersysteme

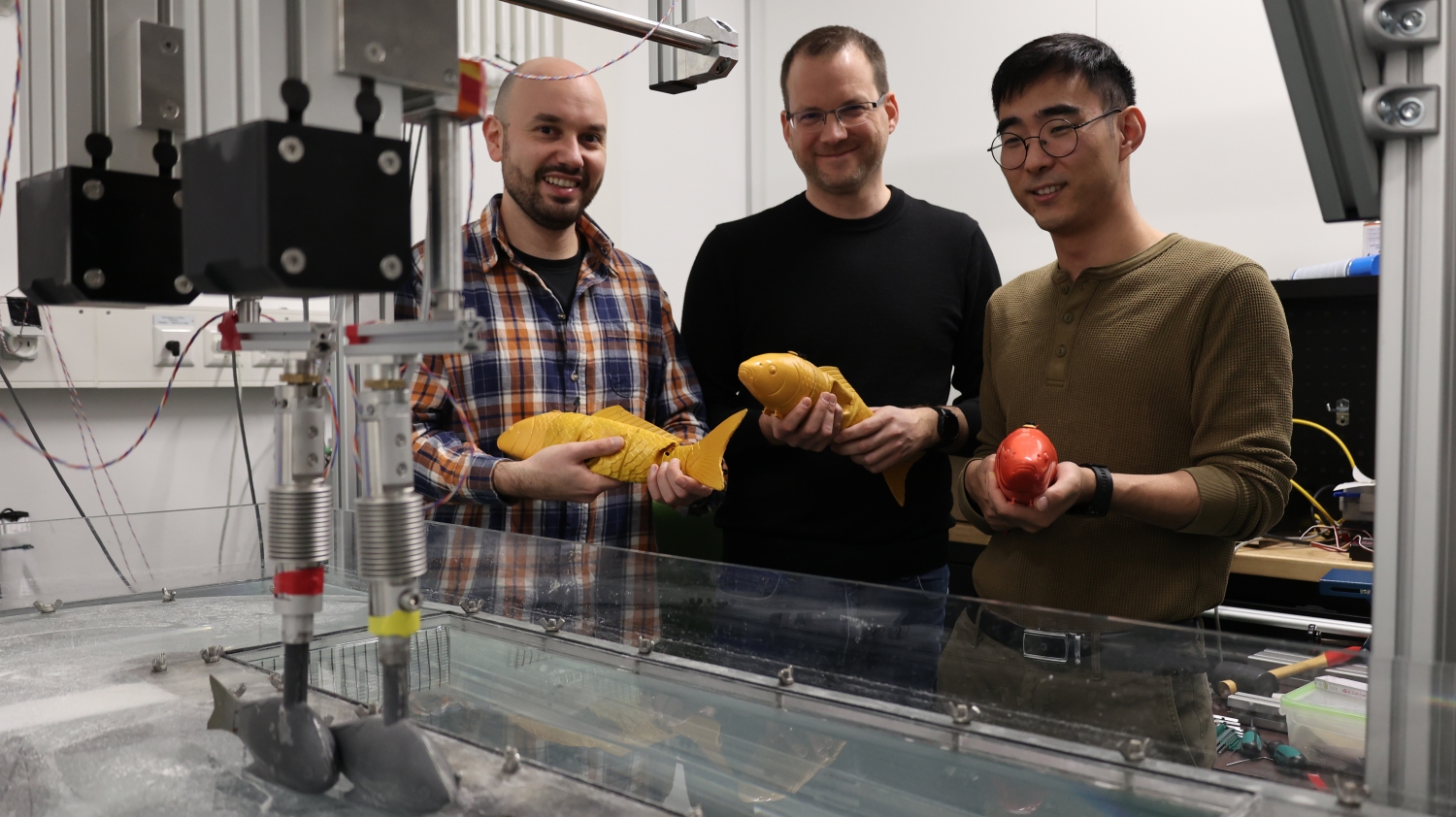
Projektleiter Liang Li beschäftigt sich mit bioinspirierten Robotern, aber auch mit der Frage, wie Roboter die Biologie inspirieren. Als Professor für cyber-physische Systeme ist Heiko Hamann seit 2022 an der Universität Konstanz. Und Gruppenleiter Andreagiovanni Reina kam im Dezember 2023 ans CASCB. Er bereichert das Gebiet mit seinem theoretischen und praktischen Wissen über kollektive Entscheidungsfindung und Schwarmrobotik.
Welche Vorteile hat es, Kollektivverhalten mit Robotern zu untersuchen, und warum ist das Ihrer Meinung nach wichtig?
Andreagiovanni Reina: Es gibt zwei Hauptforschungsrichtungen, bei denen ich mir vorstellen kann, dass die Robotik hilfreich für die Untersuchung kollektiven Verhaltens ist. Zum einen ist das der Einsatz von Robotik zum Verständnis biologischer Systeme. Daran hat Liang in den vergangenen Jahren bereits viel gearbeitet und wir wollen das fortsetzen. Die andere Richtung verfolgt den Ansatz, sich bei der Gestaltung des Verhaltens der Robotergruppen Inspiration aus der Biologie zu holen. Es hat sich als sehr schwierig erwiesen, den passenden Algorithmus zu finden, dem der einzelne Roboter folgen sollte, um eine effiziente Gruppenkoordination zu erreichen. Der Blick in die Natur ist ein wirklich guter Weg für effiziente Lösungen: in Gruppen lebende Tiere arbeiten wirksam und sehr effizient zusammen, und um die Roboter der Zukunft zu entwickeln, wollen wir die Lösungen nutzen, die die Evolution bereits gefunden hat. Deshalb ist es extrem bereichernd, wenn RobotikerInnen und BiologInnen im Team zusammen forschen.
Aber warum muss man physische Roboter auch für die Untersuchung grundlegender Fragen einsetzen, obwohl das kompliziert sein kann? Warum verwenden Sie nicht einfach Simulationen?
Liang Li: Dafür gibt es im Wesentlichen zwei Gründe: Der eine ist, dass in Robotersystemen immer eine Art von Rauschen vorhanden ist. Roboter, die mit der realen Welt interagieren, müssen immer mit verrauschten Sensorwerten umgehen. Bei einer Simulation ist das durch das Programm erzeugte Rauschen nicht wirklich zufällig. Wenn die Roboter aber mit der realen Umgebung interagieren, entsteht automatisch echtes Zufallsrauschen. Der zweite Punkt: Man kann nicht gegen physikalische Gesetze verstoßen. Unter bestimmten Annahmen können bei Simulationen oder mathematischen Modellierungen physikalische Gesetze gebrochen werden, zum Beispiel, dass simulierte Vögel nicht fliegen können, oder Fische eine Schwimmleistung von über 100 Prozent erreichen.
Andreagiovanni Reina: Ich sehe es als eine Erweiterung der fantastischen Technologie für virtuelle Realität, die in Konstanz bereits vorhanden ist. Die virtuelle Realität kann erweitert werden und echte Roboter mit einbeziehen, so dass eine Art "Roboterrealität" entsteht, in der Roboter mit Tieren interagieren. Außerdem glaube ich, dass es auch bei Experimenten ohne Tiere sehr wichtig sein kann, echte Robotern anstelle von Simulationen einzusetzen, insbesondere wenn die Umgebung für eine Simulation zu komplex und unpraktisch ist. Zum Beispiel, wenn der Roboter häufig mit seiner Umgebung interagiert, oder wenn Hydro-/Aerodynamik im Spiel ist.
Heiko Hamann: Ich möchte gerne zwei Zitate anführen. Es gibt ein berühmtes Zitat von Rodney Brooks, einem Robotiker der ersten Stunde, der sagte: „Die Welt ist ihr eigenes bestes Modell.“ Und das andere Zitat stammt von Richard Feynman: „Was ich nicht bauen kann, verstehe ich nicht."
Liang Li: Um das biologische System, das einer Sache zugrunde liegt, wirklich zu verstehen, sollte man also am besten selbst eines erschaffen.
https://youtu.be/RAXSqn250Fc?si=eiubUY4CFA4dA3cA
Könnten Sie weitere Beispiele dafür nennen, wie die Robotik uns hilft, kollektives Verhalten besser zu verstehen? Und unsere Gesellschaft als Ganzes?
Liang Li: Ein weiterer Vorteil des Einsatzes von Robotern in der Verhaltensforschung von kollektiven Systemen ist, dass man mit Tieren in der physischen Welt interagieren kann. So kann man auch kollektive Mechanismen auf Grundlage einer Methode überprüfen, die wir den "Turing-Test" für Tiersysteme nennen. Verschiedene Modellierungssysteme, verschiedene Simulationssysteme oder verschiedene Regeln können dasselbe Phänomen im Kollektivverhalten erklären. Welches aber kommt der Regel, nach der das reale biologische System funktioniert, am nächsten? Oder welches ist das beste? Unser Lösungsansatz besteht im Wesentlichen darin, einen Roboter zu entwickeln, der mit diesem Tiersystem interagieren kann, und anhand des Verhaltens des realen Systems zu prüfen, ob das Verhalten dieses Roboters natürlich ist oder nicht.
Roboterzwilling des biologischen Systems
Manchmal muss man seinen Robotern etwas Platz geben. Deshalb führen Sie die Experimente in einem Speziallabor für Schwarmforschung, dem Imaging Hangar, durch.
Liang Li: Genau, im Imaging Hangar haben wir Roboter mit biologischen Systemen kombiniert. Bislang verwenden wir ein Virtual-Reality-System, um eine sehr einfache Regel für das Folgeverhalten zu finden: Wenn Sie ein nachfolgender Roboter sind, gilt die Regel, dass Sie dem Anführer folgen. Wir fragen uns, warum diese Regel gilt. Warum nicht eine andere? Es ist sehr schwierig, dies in biologischen Systemen zu testen. Deshalb sind wir für unsere Tests zu Robotersystemen übergegangen. Wir haben die Regel bei drei verschiedenen Robotern angewendet, darunter Drohnen, Roboterautos und Roboterboote. Momentan analysieren wir die Daten.
Was haben Sie als nächstes geplant?
Liang Li: Meine Forschungsphilosophie oder mein Traum wäre es, einen Roboterzwilling des biologischen Systems zu haben. Roboterzwilling bedeutet, wir wollen alles kopieren: Eigenschaften, Morphologie, Situationen, Verhalten. Und sobald wir das Robotersystem soweit haben, können wir die Roboter zur Untersuchung biologischer Fragen einsetzen. Es gibt also eine Art Ko-Evolution zwischen Robotern und biologischen Systemen. Wenn man die Biologie besser versteht, kann man auch bessere Roboter bauen. Und bessere Roboter helfen uns, biologische Systeme besser zu verstehen. Dieser Roboterzwilling wäre zum Beispiel für Fische vorstellbar. Fische schwimmen, und interagieren durch Hydrodynamik und/oder durch Sehen. Wir können einen Roboter bauen, der das auch kann. Diesen können wir dann nutzen, um mit dem echten Fischsystem zu 'sprechen'. Wenn ich hier 'sprechen' sage, meine ich im Grunde die biologisch sinnvolle hydrodynamische oder visuelle Interaktion mit echten Fischen. Dann können wir biologische Systeme besser verstehen und wiederum einen besseren Roboterfisch bauen. Auf der Verhaltensebene könnte der Roboterzwilling auf Schwarmroboter ausgedehnt werden. Wir versuchen zum Beispiel, Schwarmflugroboter herzustellen, die als Zwillinge biologischer Systeme fliegen können. Bodenroboter könnten sich als Zwillinge von Insekten bewegen. Das ist meine Hoffnung.
Heiko Hamann: Ich mag diesen Roboter-Zwilling. Es ist also wie in der Industrie, wo es den digitalen Zwilling gibt?
Liang Li: Genau, das ist meine Inspiration.
© E. Böker, CASCBGiovanni Reina, Heiko Hamann und Liang Li mit Roboterfischen.
Wo Roboter auf Schönheit treffen
Wie wird Ihre Forschung von biologischen Systemen inspiriert und warum?
Andreagiovanni Reina: Die Natur findet oft die effizienteste Lösung für Probleme, mit denen sie konfrontiert ist. Unsere zukünftigen autonomen Roboter könnten mit ähnlichen Problemen konfrontiert werden wie Tiere, z. B. dem Auffinden und Teilen von Ressourcen, dem Transport von Gegenständen, der Pflege des Nestes oder der Arbeitsteilung unter den Gruppenmitgliedern. Meine Forschung befasst sich mit der Frage, wie Einzelpersonen effizient Informationen austauschen können, um schnelle und richtige kollektive Entscheidungen zu treffen. Mit 'effizient' meine ich hier, dass die Roboter nicht viele Informationen austauschen müssen, sondern vielleicht einfache Signale ausreichen und wir sehr einfache Maschinen haben könnten. Das passt zum Konzept der Minimalrobotik: sehr einfache Maschinen kooperieren, interagieren und organisieren sich selbst bei der Aufgabenerfüllung und Problemlösung, und ihre Fähigkeiten als Gruppe übersteigen die jedes einzelnen Individuums alleine. Dafür ist die Natur natürlich eine wunderbare Inspirationsquelle, weil man hier sehr effiziente und intelligente Lösungen finden kann, die wenig Ressourcen verbrauchen und extrem gut funktionieren!
Es ist doch sicher nicht notwendig, jedes einzelne Detail aus der Natur auf Roboter zu übertragen, oder?
Andreagiovanni Reina: Richtig, wir müssen natürlich nicht immer jedes Detail der natürlichen Systeme kopieren. Prioritäten bei den Tieren sind zum Beispiel Futter und Fortpflanzung, aber das sind keine Prioritäten für unseren Roboter. Das heißt, wenn wir das Verhalten von Tieren reproduzieren, konzentrieren wir uns oft nur auf den für uns relevanten Teil, und wir lassen das weg, was für Roboter nicht benötigt wird. Glücklicherweise tun Tiere aber auch viele Dinge, die für autonome Roboter von Bedeutung sind. So ist beispielsweise die Art und Weise, wie Tiergruppen Nahrung finden und transportieren, eine sehr wertvolle Inspirationsquelle für Roboter in autmatisierten Lagern. Das unterscheidet meine Arbeit von Liangs Projekt, bei dem es darum geht, einen Roboterzwilling zu bauen und Mechanismen und Verhalten der Tiere so nahe wie möglich zu imitieren.
Heiko Hamann: Wie Andreagiovanni schon erwähnte, gibt es die Idee der minimalen Schwarmrobotik, bei der man nicht die gesamte verfügbare Technologie in den Roboter einbaut, sondern die Komplexität des Roboters gering hält. Man erreicht dann etwas, wenn man die Maschinen zusammenarbeiten lässt. Bei dieser Forschungsrichtung lässt man sich also mehr von der Biologie inspirieren. Aber man kann diese Roboter auch mit zusätzlichen Sensoren und Kommunikationsmitteln ausstatten, damit sie mehr leisten können. Und dann bewegt man sich aus dem biologischen Bereich heraus, denn plötzlich können die Roboter vielleicht fast mit jedem in dieser Form kommunizieren.
© E. Böker, CASCBEine Herzform aus Robotern.
Wo treffen Roboter auf Schönheit?
Heiko Hamann: Bei der Modellierung. Manchmal fangen wir mit der Modellierung eines Schwarmrobotersystems an und denken dann im Laufe des Prozesses oder vielleicht durch den Entwurf, oh, das gilt in gewisser Weise auch für das biologische System. Wirklich schön ist es, wenn man sieht, dass der künstliche Schwarm und der natürliche Schwarm zusammenpassen. Das deutet nämlich darauf hin, dass man wirklich etwas gefunden hat.
Was wollen Sie gemeinsam angehen?
Andreagiovanni Reina: Liang, Heiko und ich diskutieren gerade die Idee, die Theorie der Geometrie der Entscheidungsfindung zu testen, an der Iain Couzin und seine Gruppe arbeiten. Der Grundgedanke ist, dass Entscheidungen nicht im luftleeren Raum getroffen werden. Manchmal macht man abstrakte Annahmen aus mathematischer Bequemlichkeit, aber Tiere treffen ihre Entscheidungen eingebettet in ihre Umwelt. Die geometrischen Eigenschaften der Alternativen um Sie herum sind also entscheidend für die Dynamik einer Entscheidung. Je nachdem, ob man sich in der Nähe oder in der Ferne befindet, sind die daraus resultierenden Handlungen völlig unterschiedlich, und während man Entscheidungen trifft und sich bewegt, verändert sich die Umgebung. Es wurde festgestellt, dass eine Reihe ganz unterschiedlicher Arten einem ähnlichen Muster folgen, was darauf schließen lässt, dass es sich um eine allgemeine Eigenschaft aller sich fortbewegender Organismen handelt. Wir drei wollen unsere Forschungsarbeit bündeln um diese Regeln und Muster in Roboterteams zu reproduzieren und festzustellen, ob es effiziente Lösungen für die autonome Robotik sein können.
Für das Projekt "High-fidelity robotic fish for the study of collective behaviour" erhielt Liang Li den Wissenschaftspreis der Messmer Stiftung im Jahr 2023.